パースペクティブカメラモデル
最終更新日: 2021-6-15
被写体の画像投影は次の数式によって求められます。

ここでは次のようになります。
 は、世界空間参照系におけるシーン点の位置を表す3D列ベクトルです。
は、世界空間参照系におけるシーン点の位置を表す3D列ベクトルです。
 は、写真の点の位置をピクセル単位で表す2D列ベクトルです。原点は左上の写真のピクセルの中心で、X軸は写真の右側に方向付けされ、y軸は写真の下部に方向付けされます。
は、写真の点の位置をピクセル単位で表す2D列ベクトルです。原点は左上の写真のピクセルの中心で、X軸は写真の右側に方向付けされ、y軸は写真の下部に方向付けされます。
 はカメラセンターの位置を表す3D列ベクトルです。
はカメラセンターの位置を表す3D列ベクトルです。
 はカメラの回転を表す3 × 3回転行列です。この場合、世界空間参照系の軸がカメラの方向で定義されたカメラ軸に対応します。は次のどれかで指定できます。
はカメラの回転を表す3 × 3回転行列です。この場合、世界空間参照系の軸がカメラの方向で定義されたカメラ軸に対応します。は次のどれかで指定できます。




ここでは次のようになります。
(Y, P, R) = (0, 0, 0)は、カメラがY方向(X軸が右側、Z軸が上方)に水平に視線を向けていることを意味します。
ヨー角度は、Z軸を中心とした時計回りの回転角度です。
ピッチ角度は、X軸を中心とした反時計回りの回転角度です。
ロール角度は、Y軸を中心とした時計回りの回転角度です。
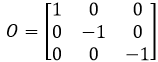
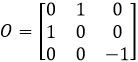
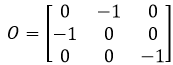
 は、カメラの方向付けで定義されたカメラ軸を基準カメラ軸にする3 × 3回転行列です(x軸は写真の右側に方向付けされ、y軸は写真の下部に方向付けされ、z軸はカメラの前面に方向付けされます)。
は、カメラの方向付けで定義されたカメラ軸を基準カメラ軸にする3 × 3回転行列です(x軸は写真の右側に方向付けされ、y軸は写真の下部に方向付けされ、z軸はカメラの前面に方向付けされます)。
| "XRightYDown": |
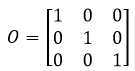
|
| "XLeftYDown": |

|
| "XLeftYUp": |

|
| "XRightYUp": |
|
| "XDownYRight": |
|
| "XDownYLeft": |

|
| "XUpYLeft": |
|
| "XUpYRight": |

|
 は、次で定義されるパースペクティブ投影関数です。
は、次で定義されるパースペクティブ投影関数です。

 は、次で定義されるディスト―ション関数です。
は、次で定義されるディスト―ション関数です。

 と
と の役割が逆になることがあります。)
の役割が逆になることがあります。)
 は焦点行列です。ここで
は焦点行列です。ここで はカメラの焦点距離(ピクセル単位)、
はカメラの焦点距離(ピクセル単位)、 はスキューパラメータ、および
はスキューパラメータ、および はピクセル率です。
はピクセル率です。
 は、カメラのプリンシパルポイントの位置をピクセル単位で表す2D列ベクトルです。原点は左上の写真のピクセルの中心で、X軸は写真の右側に方向付けされ、y軸は写真の下部に方向付けされます。
は、カメラのプリンシパルポイントの位置をピクセル単位で表す2D列ベクトルです。原点は左上の写真のピクセルの中心で、X軸は写真の右側に方向付けされ、y軸は写真の下部に方向付けされます。